EP-FALR Series Right-Angle Planetary Gearbox with Integrated Timing Belt Pulley

INTEGRATED PULLEY
UP TO 180:1
EP-FALR Series — Right-Angle Planetary Gearbox with Integrated Timing Belt Pulley
The EP-FAL's integrated pulley design in a 90° right-angle configuration. Motor and belt axes perpendicular — zero external support bearing, zero separate hub, ratios to 180:1 in a single unit.
9–2,000 Nm
i = 2 – 180
30,000 hr Life
IP65
EP-FAL vs EP-FALR — Choosing the Right Configuration
EP-FAL — Inline + Integrated Pulley
Motor axis and belt pulley axis are parallel (coaxial). The servo motor sits behind the gearbox along the same centreline as the belt. Ratios i=2–90. Efficiency ≥97% (1-stage).
EP-FALR — 90° Right-Angle + Integrated Pulley
Motor axis is perpendicular to the belt pulley axis. The servo motor folds 90° away from the belt direction. Ratios i=2–180 (extends to 180 via 2-stage bevel). Efficiency ≥95% (1-stage).
The EP-FALR uses the same integrated timing belt pulley output housing as the EP-FAL — the pulley groove is machined directly into the output housing to the same tight TIR tolerances. A precision bevel gear stage is added between the planetary stage and the pulley output, redirecting the drive 90°.
The two-stage EP-FALR extends the maximum available ratio to 180:1 — significantly beyond what the EP-FAL reaches in a single unit. This is particularly useful in applications where the belt provides no additional reduction and the full servo-to-load reduction must come from the gearbox.
- ▸Motor perpendicular to belt — frees axial space along the belt direction
- ▸Ratios up to 180:1 in a single unit — no tandem gearbox required
- ▸Same belt-tension-rated radial force as EP-FAL — up to 34,200 N
- ▸4-position output housing orientation — belt axis in any of four 90° directions
- ▸Same C1–C10 motor adapter as EP-FALR — any servo motor compatible with EP-FAL fits
EP-FALR: 7 frame sizes, 070–280 mm, 90° right-angle integrated pulley output
Frame Size Range — EP-FALR070 to EP-FALR280
EP-FALR Series Technical Specifications
| Parameter | EP-FALR070 | EP-FALR095 | EP-FALR110 | EP-FALR150 | EP-FALR190 | EP-FALR230 | EP-FALR280 |
|---|---|---|---|---|---|---|---|
| Rated Output Torque T₂ₙ (Nm) — 1-stage (i=2–10) | |||||||
| i=2 | 9 | 36 | 90 | 195 | 342 | 588 | 1,140 |
| i=3 | 12 | 48 | 120 | 260 | 520 | 1,040 | 1,680 |
| i=4 | 15 | 60 | 150 | 325 | 650 | 1,200 | 2,000 |
| i=5 | 18 | 55 | 150 | 310 | 600 | 1,100 | 1,900 |
| i=7 | 17 | 45 | 120 | 260 | 500 | 1,000 | 1,600 |
| i=9 / i=10 | 14 / — | 40 / 55 | 100 / 150 | 230 / 310 | 450 / 600 | 900 / 1,100 | 1,500 / 1,900 |
| Rated Output Torque T₂ₙ (Nm) — 2-stage (i=15–180) | |||||||
| i=10 / 15 | 9 / 12 | — / 48 | — / 120 | — / 260 | — / 520 | — / 1,040 | — / 1,680 |
| i=20 / 25 | 15 / 18 | 60 / 55 | 150 | 325 / 310 | 650 / 600 | 1,200 / 1,100 | 2,000 / 1,900 |
| i=40 / 50 | 22 / 18 | 60 / 55 | 100 / 150 | 230 / 310 | 650 / 600 | 1,200 / 1,100 | 2,000 / 1,900 |
| i=100 / 120 | — | — / — | 150 / 140 | 310 / 300 | 600 / 550 | 1,100 | 1,900 / 1,800 |
| i=160 / 180 | — | — | 100 / 100 | 230 | 450 | 900 | 1,500 |
| Performance Parameters | |||||||
| Max Output Torque T₂ₘₐₓ | 3× rated torque (all sizes) | ||||||
| Rated Input Speed nᵢₙ (rpm) — i=2 / i=3–180 | 3,000 / 5,000 | 2,600 / 4,000 | 2,000 / 3,000 | 1,350 / 2,000 | |||
| Max Input Speed nᵢₙₘₐₓ (rpm) — i=2 / i=3–180 | 6,000 / 10,000 | 5,200 / 8,000 | 4,000 / 6,000 | 2,700 / 4,000 | |||
| Backlash P0 — Ultra-Precision (arc-min) | — (N/A) | ≤2 (1-stage) / ≤4 (2-stage) | |||||
| Backlash P1 — Precision (arc-min) | ≤4 (1-stage) / ≤7 (2-stage) | ||||||
| Backlash P2 — Standard (arc-min) | ≤6 (1-stage) / ≤9 (2-stage) | ||||||
| Torsional Rigidity (Nm/arc-min) | 7 | 13 | 31 | 82 | 151 | 440 | 1,006 |
| Permissible Radial Force F_rad (N) | 2,120 | 4,450 | 6,500 | 10,950 | 15,700 | 25,000 | 34,200 |
| Permissible Axial Force F_ax (N) | 1,060 | 2,225 | 3,250 | 5,475 | 7,850 | 12,500 | 17,100 |
| Service Life (hr) | ≥30,000 (continuous duty: ≥15,000) | ||||||
| Efficiency η — 1-stage / 2-stage | ≥95% / ≥92% | ||||||
| Weight — 1-stage (kg) | 1.4 | 3.1 | 6.8 | 13.8 | 27.3 | 53.2 | 83.3 |
| Weight — 2-stage (kg) | 1.5 | 2.8 | 5 | 12.5 | 24.3 | 45.4 | 78.8 |
| Operating Temperature | -10°C to +90°C | ||||||
| Lubricant | NYOGEL 792D (synthetic, lifetime) | ||||||
| Protection Class | IP65 | ||||||
| Mounting Direction | Any direction | ||||||
| Noise (nᵢₙ=3,000 rpm, dB) | ≤61 | ≤63 | ≤65 | ≤68 | ≤70 | ≤72 | ≤74 |
Notes: P0 not available for EP-FALR070 and EP-FALR095; minimum P0 starts at EP-FALR110 at ≤2 arc-min (bevel stage adds ~1 arc-min vs EP-FAL P0 of ≤1). Efficiency ≥95%/≥92% includes bevel stage loss. Service life ≥30,000 hr intermittent; continuous-duty ≥15,000 hr. F_rad rated at pulley centre — apply K_a correction for off-centre belt engagement.
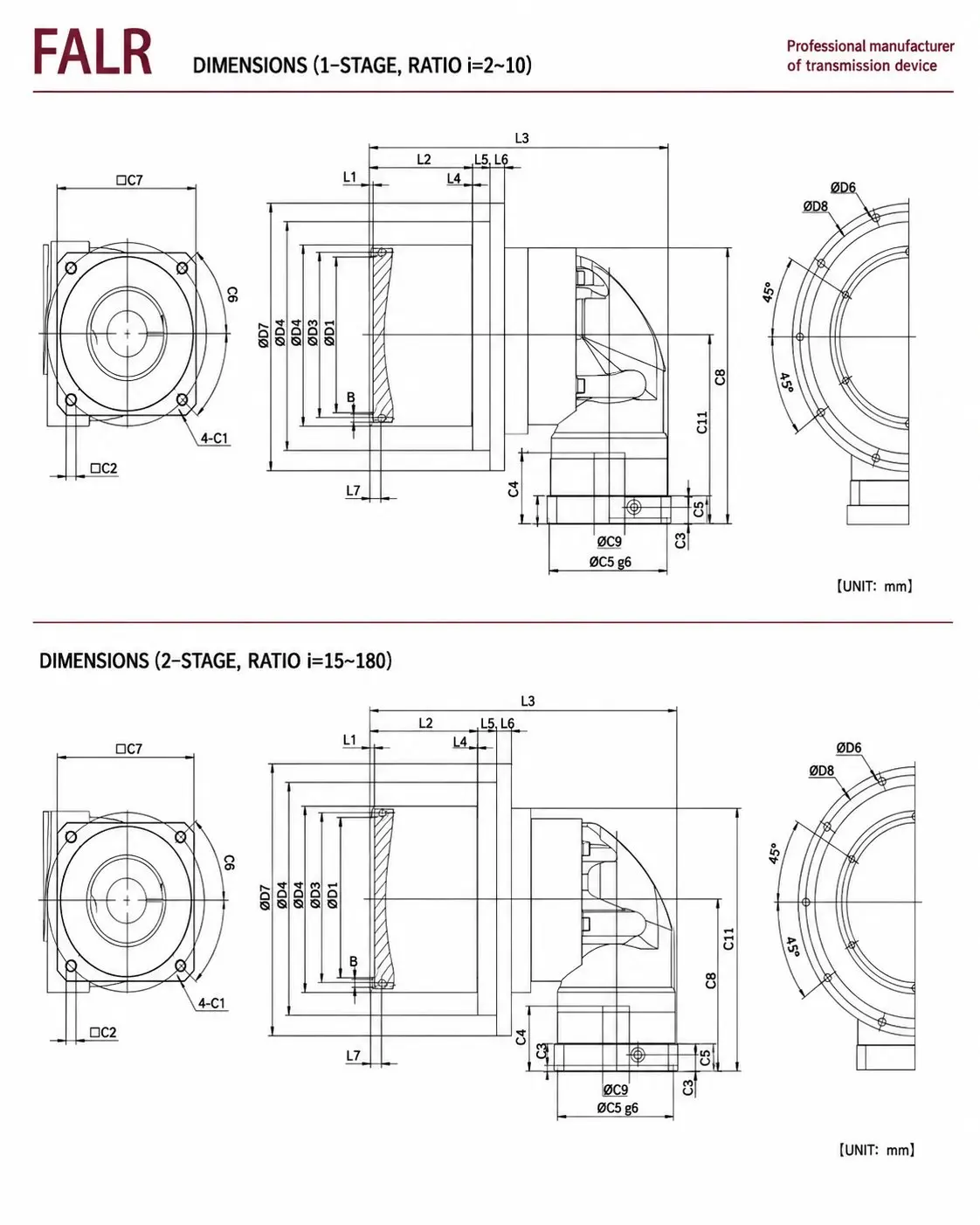
Integrated Pulley Output Dimensions
The EP-FALR uses the same pulley housing geometry as the EP-FAL — the pulley groove is machined into the output of the bevel gear output stage. Pulley OD, belt width, and pilot diameter are identical to the EP-FAL for each frame size:
| Frame | Pulley OD D₃ (mm) | Belt Width W (mm) | Pilot Dia. D₅ (mm) | Retention Screw | Standard Profile |
|---|---|---|---|---|---|
| EP-FALR070 | 37.5 | 6 | 60 | M3 × 0.5P | T5 / custom |
| EP-FALR095 | 55.5 | 8 | 100 | M3 × 0.5P | T5 / AT5 / custom |
| EP-FALR110 | 70.5 | 8 | 100 | M4 × 0.7P | T5 / AT5 / T10 / custom |
| EP-FALR150 | 102.5 | 8 | 150 | M5 × 0.8P | AT5 / T10 / AT10 / custom |
| EP-FALR190 | 132.5 | 12 | 190 | M5 × 0.8P | AT5 / T10 / AT10 / custom |
| EP-FALR230 | 169.5 | 12 | 215 | M6 × 1P | T10 / AT10 / custom |
| EP-FALR280 | 204.5 | 12 | 235 | M6 × 1P | T10 / AT10 / custom |
Engineering Features
90° Bevel Output to Pulley
Precision spiral bevel pair redirects drive 90° before the integrated pulley stage. The belt axis is perpendicular to the motor — enabling motor-behind-the-gantry and corner-drive belt layouts not possible with the inline EP-FAL.
Integral Pulley — Same TIR Standard
The belt groove is machined into the bevel output housing in the same setup as the output bearing race. Pulley TIR meets the same standard as the EP-FAL — zero additional runout from a separate hub-to-shaft interface.
180:1 Maximum Ratio
Two-stage EP-FALR reaches i=180 — the highest single-unit ratio with a belt-pulley output in the Korea Ever-Power range. Covers ratios 15, 20, 25, 30, 35, 40, 45, 50, 60, 70, 80, 90, 100, 120, 140, 160, 180.
34,200 N Radial Force Rating
Identical to the EP-FAL — the enlarged output bearing absorbs high belt tension in wide AT10 drive systems. No external support bearing required regardless of belt width or pre-tension level within the rating.
4-Position Output Orientation
The bevel-pulley output housing rotates in four 90° increments to direct the belt axis in any required direction relative to the motor. Repositionable in the field without disassembly.
IP65 + NYOGEL 792D
Full IP65 across both the planetary stage and bevel-pulley housing. NYOGEL 792D lifetime grease — suited to dusty, wet, and washdown environments in wood routing, stone cutting, and food processing belt drives.
Installation Notes

EP-FALR output orientation and belt-tension radial force diagram
The motor input end assembles identically to the EP-FAL (clamp-ring C1–C10). Three points are specific to the right-angle pulley output:
Before tightening the stop pin, confirm the bevel-pulley output housing is rotated to the correct 90° position — the belt must run in the intended plane. Loosen the four housing bolts, rotate to the required direction, and re-torque in a cross pattern per the installation manual. The belt groove must be parallel to the mating pulley within 0.5 mm per 100 mm of centre distance.
Verify F_rad_actual ≤ F_rad_rated for the chosen frame. For timing belt drives: F_rad ≈ 1.5 × Ftight_side at the pulley centre. Apply position load factor K_a if belt pull does not act at the pulley centreline. See the installation manual for K_a curves per frame size.
The bevel stage reduces efficiency to ≥95%/≥92% vs the EP-FAL's ≥97%/≥94%. At high speed and full torque, verify that the thermal power dissipation does not exceed the housing's natural convection limit — particularly for EP-FALR190 and larger frames in confined enclosures.
Manufacturing & Quality

Planetary ring gear and planet gears profile-ground to DIN 5. Same gear accuracy class as all other Korea Ever-Power high-precision series.
Bevel tooth contact pattern verified with marking compound after assembly. Units with contact area outside the specified zone are reworked and re-inspected before advancing to pulley TIR measurement.
Integral pulley groove TIR measured at 100 rpm after final assembly. Units outside TIR specification are remachined. The bevel-to-pulley housing machining sequence ensures pulley TIR matches the bearing runout.
Individual backlash measurement and P0/P1/P2 grade stamping. Pneumatic pressure seal test on both the planetary housing and bevel-pulley housing interfaces before shipping.
Primary Application Areas
Corner-Drive Gantries
CNC gantry axes where the servo motor must be positioned at the end of the beam, perpendicular to the belt travel direction. The EP-FALR folds the motor behind the gantry end plate — freeing the full beam length for workpiece clearance.
Right-Angle Belt Conveyors
Servo-driven belt conveyors in food processing and packaging lines where the drive motor must be mounted on the side frame rather than in-line with the belt. Large F_rad handles wide flat-belt tension loads.
Right-Angle Winders
Film and foil winding machines where the servo drives a belt-driven mandrel at 90° to the motor shaft. Two-stage i=80–180 covers high-reduction winding axes in a single unit.
Stone & Wood CNC — Side Drives
Stone cutting and wood routing gantries where the servo motor is mounted on the side frame, perpendicular to gantry travel. IP65 protects against stone slurry and wood chip ingress.
Cartesian Robot Corner Joints
Cartesian robot modules where the motor on one axis drives a belt perpendicular to its own shaft — a common configuration in gantry-type Cartesian robots where X and Y motor axes are perpendicular to the travel directions.
High-Ratio Direct Belt Drives
Applications where the belt runs at a 1:1 ratio (no further belt reduction) and the full servo-to-load reduction comes from the EP-FALR. i=180 provides a large single-unit reduction in these belt-as-coupling configurations.

How to Order — EP-FALR Order Code
The EP-FALR order code follows the same structure as the EP-FAL. Specify belt profile and output housing orientation at time of order:
—
020
—
P1
/
MITSUBISHI HG-SR52
| Code Field | Options | Notes |
|---|---|---|
| Model | EP-FALR070 / EP-FALR095 / EP-FALR110 / EP-FALR150 / EP-FALR190 / EP-FALR230 / EP-FALR280 | Select by output torque and belt radial force requirement |
| Ratio | 1-stage: 2, 3, 4, 5, 6, 7, 8, 9, 10 | 2-stage: 15, 20, 25, 30, 35, 40, 45, 50, 60, 70, 80, 90, 100, 120, 140, 160, 180 | 3-digit code: "002" = i=2, "180" = i=180 |
| Precision Grade | P0 = ≤2 arc-min (EP-FALR110+) | P1 = ≤4 arc-min | P2 = ≤6 arc-min | P0 not available for EP-FALR070 and EP-FALR095 |
| Motor | Motor manufacturer name + model number | Korea Ever-Power supplies matching clamp-ring adapter ring |
| Belt Profile (optional) | T5, AT5, T10, AT10, or custom | Standard profile supplied if not specified; confirm output housing orientation required |
Complementary Products

Inline (coaxial) belt pulley gearbox. Higher efficiency (≥97% vs ≥95%), ratios to 90:1. Choose when motor and belt axes can be parallel and maximum efficiency is required.
Right-angle gearbox with shaft output. Choose when the output connects via coupling to a separately-mounted pulley, or when the load is a rack-and-pinion or direct coupling rather than a belt.
Low-cost right-angle speed reducer. No integrated pulley — a separate belt hub must be added. Suitable for low-speed, low-precision belt drives where planetary accuracy is not needed.
Heavy-duty right-angle drives for belt-driven agricultural machinery where high torque, shock loading, and outdoor exposure are primary requirements rather than servo-grade precision.
Ready to Specify Your EP-FALR Gearbox?
Provide your motor model, required output torque, gear ratio, belt profile, expected belt tension (to verify F_rad), and the required output housing orientation. Our engineers respond within 24 hours.
Frequently Asked Questions
What Engineers Say About the EP-FALR Series
Feedback from machine builders using the EP-FALR right-angle integrated belt pulley gearbox in gantry, conveyor, and winding applications.
We use the EP-FALR190 at i=5 on a stone CNC gantry X-axis. The motor folds behind the gantry end plate perpendicular to travel — we gained 180 mm of working length compared to the inline arrangement we had before. The integrated pulley eliminated the external support bearing and bracket that was our main maintenance point in a wet stone-slurry environment. IP65 holds perfectly after 18 months.

"Used EP-FALR230 at i=100 for a film winder where the servo drives a belt-coupled mandrel at 90°. The 100:1 ratio in one unit let us remove a separate inline speed reducer that was in the drive chain before — total drive components went from seven to four. Winding tension control stability improved noticeably."
"EP-FALR110-P1 on a laser cutting gantry Y-axis — motor behind the end plate, belt running along the beam. The 4-position output housing orientation was key: we tested three different motor positions during prototyping by simply rotating the housing, without reordering. Good advice: confirm the required orientation before the machine goes to the customer."
"We run EP-FALR280 at i=9 on a plasma cutting gantry corner drive. Motor perpendicular to belt, 34,200 N F_rad handles our wide AT10 × 75 mm belt tension of 22,800 N. The gantry gained 200 mm working clearance at the drive end. One maintenance note: verify belt-pulley parallelism after each belt replacement — the right-angle layout makes this a two-person job."
"In our Cartesian robot module, the X-axis motor is perpendicular to the X-belt travel by design — we always needed a right-angle drive. Previously: EP-FABR + separate pulley hub + support bearing = six parts, three alignments. Now: EP-FALR095 = one part, one alignment. Assembly time per robot module dropped from 3.5 hours to 40 minutes."
Additional information
| Editor | Cxm |
|---|
Related products
-

EP-HAB Series High Rigidity Planetary Gearbox — ≤3 Arcmin Ultra Precision, IP65 Sealed
-

EP-PBL/PBF Series High Precision Planetary Gearbox — ≤5 Arcmin Backlash, IP65 Sealed
-

EP-PL/PF Series Standard Precision Planetary Gearbox — Round & Square Flange Inline Output
-

EP-FPG / EP-FPGA Series Economy Planetary Gearbox | Round & Square Housing
-

EP-FAL Series Planetary Gearbox with Integrated Timing Belt Pulley
-

EP-FADS Series Adapting-Flange High-Speed Planetary Gearbox | Direct Motor Mount
-

EP-FABR Series Right-Angle Planetary Gearbox | 90° Bevel Output
-

EP-FAB Series High Precision Planetary Gearbox | Square Flange Inline

