EP-FALR 시리즈 일체형 타이밍 벨트 풀리가 장착된 직각 유성 기어박스

통합 풀리
최대 180:1
EP-FALR 시리즈 — 타이밍 벨트 풀리가 통합된 직각 유성 기어박스
EP-FAL의 통합 풀리 설계는 다음과 같은 특징을 갖습니다. 90° 직각 구성모터와 벨트 축이 수직을 이루며, 외부 지지 베어링이나 별도의 허브가 필요 없고, 단일 장치에서 최대 180:1의 기어비를 구현합니다.
9–2,000 Nm
i = 2 – 180
30,000시간 수명
IP65
EP-FAL과 EP-FALR 중 어떤 구성이 적합한가?
EP-FAL — 인라인 + 통합 풀리
모터 축과 벨트 풀리 축은 평행(동축)입니다. 서보 모터는 기어박스 뒤쪽, 벨트와 동일한 중심선을 따라 위치합니다. 기어비 i=2~90. 효율 ≥97%(1단).
EP-FALR — 90° 직각 + 일체형 풀리
모터 축은 벨트 풀리 축에 수직입니다. 서보 모터는 벨트 방향에서 90° 각도로 접힙니다. 기어비는 i=2~180이며, 2단 베벨 기어를 통해 180도까지 확장 가능합니다. 효율은 1단 기어 기준 95% 이상입니다.
EP-FALR은 EP-FAL과 동일한 일체형 타이밍 벨트 풀리 출력 하우징을 사용합니다. 풀리 홈은 동일한 엄격한 TIR 공차로 출력 하우징에 직접 가공됩니다. 유성 기어단과 풀리 출력단 사이에 정밀 베벨 기어단이 추가되어 구동 방향을 90°로 전환합니다.
2단계 EP-FALR은 최대 가용 비율을 확장합니다. 180:1 이는 EP-FAL 단일 장치의 성능을 훨씬 뛰어넘는 수준입니다. 특히 벨트가 추가적인 감속을 제공하지 않고 서보-부하 감속을 전적으로 기어박스에서 수행해야 하는 애플리케이션에 유용합니다.
- ▸모터가 벨트에 수직으로 배치됨 — 벨트 방향을 따라 축 방향 공간을 확보함
- ▸단일 장치에서 최대 180:1의 기어비 구현 - 별도의 탠덤 기어박스 필요 없음
- ▸EP-FAL과 동일한 벨트 장력 등급의 레이디얼 힘 - 최대 34,200N
- ▸4방향 출력 하우징 방향 — 벨트 축은 90°의 네 방향 중 어느 방향으로든 설정 가능
- ▸EP-FALR과 동일한 C1-C10 모터 어댑터를 사용하며, EP-FAL과 호환되는 모든 서보 모터가 장착 가능합니다.
EP-FALR: 7가지 프레임 크기, 070~280mm, 90° 직각 일체형 풀리 출력
프레임 크기 범위 — EP-FALR070 ~ EP-FALR280
EP-FALR 시리즈 기술 사양
| 매개변수 | EP-FALR070 | EP-FALR095 | EP-FALR110 | EP-FALR150 | EP-FALR190 | EP-FALR230 | EP-FALR280 |
|---|---|---|---|---|---|---|---|
| 정격 출력 토크 T₂ₙ (Nm) — 1단 (i=2–10) | |||||||
| i=2 | 9 | 36 | 90 | 195 | 342 | 588 | 1,140 |
| i=3 | 12 | 48 | 120 | 260 | 520 | 1,040 | 1,680 |
| i=4 | 15 | 60 | 150 | 325 | 650 | 1,200 | 2,000 |
| i=5 | 18 | 55 | 150 | 310 | 600 | 1,100 | 1,900 |
| i=7 | 17 | 45 | 120 | 260 | 500 | 1,000 | 1,600 |
| i=9 / i=10 | 14 / — | 40 / 55 | 100 / 150 | 230 / 310 | 450 / 600 | 900 / 1,100 | 1,500 / 1,900 |
| 정격 출력 토크 T₂ₙ (Nm) — 2단 (i=15–180) | |||||||
| i=10 / 15 | 9 / 12 | — / 48 | — / 120 | — / 260 | — / 520 | — / 1,040 | — / 1,680 |
| i=20 / 25 | 15 / 18 | 60 / 55 | 150 | 325 / 310 | 650 / 600 | 1,200 / 1,100 | 2,000 / 1,900 |
| i=40 / 50 | 22 / 18 | 60 / 55 | 100 / 150 | 230 / 310 | 650 / 600 | 1,200 / 1,100 | 2,000 / 1,900 |
| i=100 / 120 | — | — / — | 150 / 140 | 310 / 300 | 600 / 550 | 1,100 | 1,900 / 1,800 |
| i=160 / 180 | — | — | 100 / 100 | 230 | 450 | 900 | 1,500 |
| 성능 매개변수 | |||||||
| 최대 출력 토크 T₂ₘₐₓ | 정격 토크의 3배 (모든 사이즈) | ||||||
| 정격 입력 속도 nᵢₙ (rpm) — i=2 / i=3–180 | 3,000 / 5,000 | 2,600 / 4,000 | 2,000 / 3,000 | 1,350 / 2,000 | |||
| 최대 입력 속도 nᵢₙₘₐₓ (rpm) — i=2 / i=3–180 | 6,000 / 10,000 | 5,200 / 8,000 | 4,000 / 6,000 | 2,700 / 4,000 | |||
| 백래시 P0 — 초정밀도(arc-min) | — (해당 없음) | ≤2 (1단계) / ≤4 (2단계) | |||||
| 백래시 P1 — 정밀도(arc-min) | ≤4 (1단계) / ≤7 (2단계) | ||||||
| 백래시 P2 — 표준(최소 호) | ≤6 (1단계) / ≤9 (2단계) | ||||||
| 비틀림 강성 (Nm/arc-min) | 7 | 13 | 31 | 82 | 151 | 440 | 1,006 |
| 허용 방사력 F_rad (N) | 2,120 | 4,450 | 6,500 | 10,950 | 15,700 | 25,000 | 34,200 |
| 허용 축력 F_ax (N) | 1,060 | 2,225 | 3,250 | 5,475 | 7,850 | 12,500 | 17,100 |
| 사용 수명(시간) | 3만 이상 (연속 근무 시간: ≥15,000시간) | ||||||
| 효율 η — 1단계 / 2단계 | ≥95% / ≥92% | ||||||
| 무게 — 1단계 (kg) | 1.4 | 3.1 | 6.8 | 13.8 | 27.3 | 53.2 | 83.3 |
| 무게 — 2단계 (kg) | 1.5 | 2.8 | 5 | 12.5 | 24.3 | 45.4 | 78.8 |
| 작동 온도 | -10°C ~ +90°C | ||||||
| 윤활유 | NYOGEL 792D (합성, 수명) | ||||||
| 보호 등급 | IP65 | ||||||
| 장착 방향 | 어느 방향이든 | ||||||
| 소음 (nᵢₙ=3,000 rpm, dB) | ≤61 | ≤63 | ≤65 | ≤68 | ≤70 | ≤72 | ≤74 |
참고: EP-FALR070 및 EP-FALR095의 경우 P0 값을 사용할 수 없습니다. 최소 P0 값은 EP-FALR110에서 ≤2 arc-min(베벨 스테이지는 EP-FAL P0 ≤1 대비 약 1 arc-min 추가)부터 시작합니다. 효율은 ≥95%/≥92%이며 베벨 스테이지 손실을 포함합니다. 사용 수명은 간헐 작동 시 ≥30,000시간, 연속 작동 시 ≥15,000시간입니다. F_rad는 풀리 중심에서 측정되었으며, 벨트 체결이 중심에서 벗어난 경우 K_a 보정값을 적용해야 합니다.
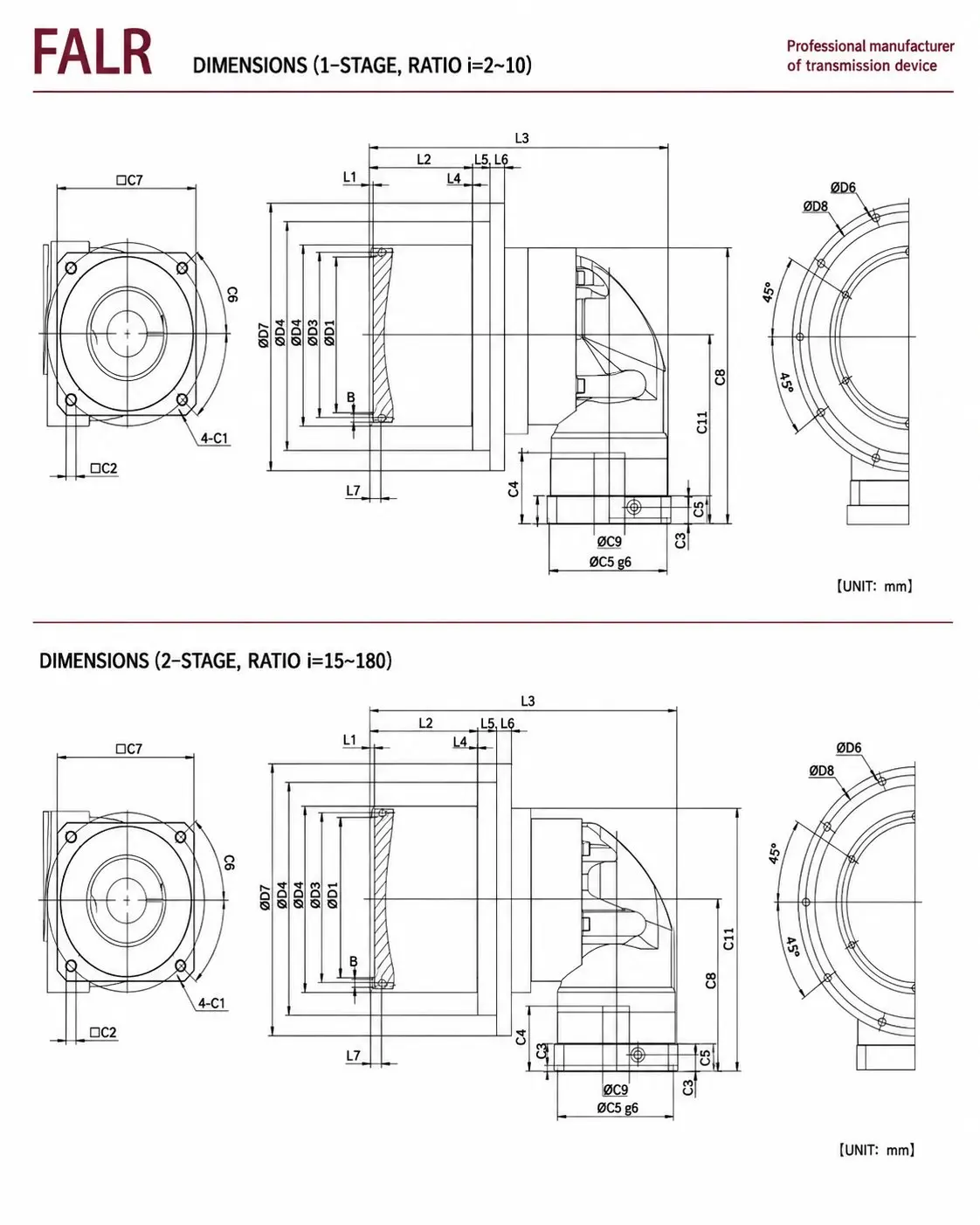
통합 풀리 출력 치수
EP-FALR은 EP-FAL과 동일한 풀리 하우징 형상을 사용합니다. 풀리 홈은 베벨 기어 출력단의 출력부에 가공되어 있습니다. 풀리 외경, 벨트 폭, 파일럿 직경은 각 프레임 크기에 대해 EP-FAL과 동일합니다.
| 액자 | 풀리 외경 D₃ (mm) | 벨트 폭 W (mm) | 파일럿 직경 D₅ (mm) | 고정 나사 | 표준 프로필 |
|---|---|---|---|---|---|
| EP-FALR070 | 37.5 | 6 | 60 | M3 × 0.5P | T5 / 사용자 정의 |
| EP-FALR095 | 55.5 | 8 | 100 | M3 × 0.5P | T5 / AT5 / 커스텀 |
| EP-FALR110 | 70.5 | 8 | 100 | M4 × 0.7P | T5 / AT5 / T10 / 커스텀 |
| EP-FALR150 | 102.5 | 8 | 150 | M5 × 0.8P | AT5 / T10 / AT10 / 커스텀 |
| EP-FALR190 | 132.5 | 12 | 190 | M5 × 0.8P | AT5 / T10 / AT10 / 커스텀 |
| EP-FALR230 | 169.5 | 12 | 215 | M6 × 1P | T10 / AT10 / 사용자 정의 |
| EP-FALR280 | 204.5 | 12 | 235 | M6 × 1P | T10 / AT10 / 사용자 정의 |
엔지니어링 특징
90° 경사 출력에서 풀리로
정밀 나선형 베벨 쌍은 통합 풀리 단계 전에 구동력을 90°로 전환합니다. 벨트 축은 모터에 수직이므로 인라인 EP-FAL에서는 불가능했던 갠트리 뒤쪽 모터 배치 및 코너 구동 벨트 레이아웃이 가능합니다.
일체형 풀리 — 동일한 TIR 표준
벨트 홈은 출력 베어링 레이스와 동일한 구조로 베벨 출력 하우징에 가공되어 있습니다. 풀리 TIR은 EP-FAL과 동일한 기준을 충족하며, 별도의 허브-샤프트 인터페이스로 인한 추가적인 런아웃이 없습니다.
최대 비율 180:1
2단 EP-FALR은 한국 Ever-Power 제품군 중 벨트 풀리 방식 최고 기어비인 i=180에 도달합니다. 15, 20, 25, 30, 35, 40, 45, 50, 60, 70, 80, 90, 100, 120, 140, 160, 180의 기어비를 지원합니다.
34,200N 방사형 힘 등급
EP-FAL과 동일한 이 제품은 확장된 출력 베어링을 사용하여 넓은 AT10 구동 시스템에서 높은 벨트 장력을 흡수합니다. 정격 범위 내에서 벨트 폭이나 예압 수준에 관계없이 외부 지지 베어링이 필요하지 않습니다.
4위치 출력 방향
베벨 풀리 출력 하우징은 90° 단위로 4단계 회전하여 모터에 대한 벨트 축의 방향을 원하는 대로 조절할 수 있습니다. 분해 없이 현장에서 위치를 변경할 수 있습니다.
IP65 + NYOGEL 792D
유성 기어단과 경사 풀리 하우징 모두 IP65 등급의 완벽한 방수/방진 기능을 갖추고 있습니다. NYOGEL 792D 평생 윤활유를 사용하여 목재 가공, 석재 절단 및 식품 가공 벨트 구동 장치의 먼지, 습기 및 세척 환경에 적합합니다.
설치 참고 사항

EP-FALR 출력 방향 및 벨트 장력 방사형 힘 도표
모터 입력단은 EP-FAL(클램프 링 C1~C10)과 동일하게 조립됩니다. 직각 풀리 출력에는 세 가지 특정 지점이 있습니다.
스톱 핀을 조이기 전에 베벨 풀리 출력 하우징이 90° 위치로 정확하게 회전되었는지 확인하십시오. 벨트는 의도된 평면에서 작동해야 합니다. 하우징 볼트 4개를 풀고 필요한 방향으로 회전시킨 다음 설치 설명서에 따라 횡방향으로 다시 조이십시오. 벨트 홈은 중심 거리 100mm당 0.5mm 이내로 맞물리는 풀리와 평행해야 합니다.
선택한 프레임에 대해 F_rad_actual ≤ F_rad_rated인지 확인하십시오. 타이밍 벨트 구동 방식의 경우 풀리 중심에서 F_rad ≈ 1.5 × Ftight_side입니다. 벨트 장력이 풀리 중심선에서 작용하지 않는 경우 위치 하중 계수 K_a를 적용하십시오. 프레임 크기별 K_a 곡선은 설치 설명서를 참조하십시오.
경사 절단 단계는 효율을 EP-FAL의 ≥97%/≥94% 대비 ≥95%/≥92%로 감소시킵니다. 고속 및 최대 토크 조건에서 열 방출량이 하우징의 자연 대류 한계를 초과하지 않는지 확인하십시오. 특히 밀폐된 공간에 설치되는 EP-FALR190 이상의 대형 프레임의 경우 더욱 중요합니다.
제조 및 품질

유성 링 기어 및 유성 기어는 DIN 5 규격에 따라 프로파일 연삭되었습니다. 모든 한국 에버파워 고정밀 시리즈와 동일한 기어 정밀도 등급을 갖습니다.
조립 후 마킹 컴파운드를 사용하여 경사면 톱니 접촉 패턴을 확인합니다. 지정된 영역을 벗어난 접촉 면적을 가진 제품은 재작업 및 재검사를 거친 후 풀리 TIR 측정 단계로 진행합니다.
일체형 풀리 홈의 TIR(총 회전각)은 최종 조립 후 100rpm에서 측정됩니다. TIR 규격 범위를 벗어난 제품은 재가공됩니다. 베벨 가공에서 풀리 하우징 가공까지의 순서는 풀리 TIR이 베어링 런아웃과 일치하도록 보장합니다.
개별 백래시 측정 및 P0/P1/P2 등급 스탬핑. 출하 전 유성 기어 하우징과 경사 풀리 하우징 접합부 모두에 대한 공압 밀봉 테스트 실시.
주요 응용 분야
코너 드라이브 갠트리
CNC 갠트리 축에서 서보 모터는 벨트 이동 방향에 수직으로 빔 끝에 위치해야 합니다. EP-FALR은 모터를 갠트리 끝판 뒤쪽으로 접어 넣어 빔 전체 길이를 공작물 통과 공간으로 활용할 수 있도록 합니다.
직각 벨트 컨베이어
식품 가공 및 포장 라인에서 구동 모터를 벨트와 일직선이 아닌 측면 프레임에 장착해야 하는 서보 구동 벨트 컨베이어에 적합합니다. 대형 F_rad는 폭이 넓은 평벨트의 장력 하중을 처리할 수 있습니다.
직각 와인더
서보 모터가 모터 축에 대해 90° 각도로 벨트 구동식 맨드릴을 구동하는 필름 및 포일 권선기. 2단 i=80–180은 단일 장치에서 고감속 권선 축을 지원합니다.
석재 및 목재 CNC - 측면 구동
서보 모터가 측면 프레임에 장착되어 갠트리 이동 방향에 수직인 석재 절단 및 목재 라우팅 갠트리에 사용됩니다. IP65 등급은 석재 슬러리 및 목재 칩의 유입을 방지합니다.
카르테시안 로봇 코너 조인트
한 축의 모터가 자체 축에 수직인 벨트를 구동하는 카르테시안 로봇 모듈은 X축과 Y축 모터가 이동 방향에 수직인 갠트리형 카르테시안 로봇에서 흔히 볼 수 있는 구성입니다.
고비율 직접 벨트 구동 방식
벨트가 1:1 비율로 작동하는 애플리케이션(추가 벨트 감속 없음)에서 서보-부하 감속은 EP-FALR에서 완전히 이루어집니다. i=180은 이러한 벨트 커플링 구성에서 큰 단일 장치 감속을 제공합니다.

주문 방법 — EP-FALR 주문 코드
EP-FALR 주문 코드는 EP-FAL과 동일한 구조를 따릅니다. 주문 시 벨트 프로파일과 출력 하우징 방향을 지정하십시오.
—
020
—
피1
/
미쓰비시 HG-SR52
| 코드 필드 | 옵션 | 메모 |
|---|---|---|
| 모델 | EP-FALR070 / EP-FALR095 / EP-FALR110 / EP-FALR150 / EP-FALR190 / EP-FALR230 / EP-FALR280 | 출력 토크 및 벨트 반경 방향 힘 요구 사항에 따라 선택하십시오. |
| 비율 | 1단계: 2, 3, 4, 5, 6, 7, 8, 9, 10 | 2단계: 15, 20, 25, 30, 35, 40, 45, 50, 60, 70, 80, 90, 100, 120, 140, 160, 180 | 3자리 코드: "002" = i=2, "180" = i=180 |
| 정밀 등급 | P0 = ≤2 arc-min (EP-FALR110+) | P1 = ≤4 아크분 | P2 = ≤6 아크-분 | EP-FALR070 및 EP-FALR095의 경우 P0을 사용할 수 없습니다. |
| 모터 | 모터 제조업체명 + 모델 번호 | 한국 Ever-Power는 해당 클램프 링 어댑터 링을 제공합니다. |
| 벨트 프로필 (선택 사항) | T5, AT5, T10, AT10 또는 사용자 지정 | 별도로 지정하지 않으면 표준 프로파일이 제공됩니다. 출력 하우징 방향이 필요한지 확인하십시오. |
보완 제품

인라인(동축) 벨트 풀리 기어박스. 더 높은 효율(≥97% vs ≥95%), 최대 90:1의 기어비. 모터와 벨트 축을 평행하게 배치할 수 있고 최대 효율이 필요한 경우에 선택하십시오.
샤프트 출력 방식의 직각 기어박스. 출력이 별도로 장착된 풀리에 커플링을 통해 연결되는 경우, 또는 부하가 벨트가 아닌 랙앤피니언이나 직접 연결 방식인 경우를 선택할 수 있습니다.
저가형 직각 감속기입니다. 풀리가 내장되어 있지 않으므로 별도의 벨트 허브를 추가해야 합니다. 유성 기어의 정밀도가 필요하지 않은 저속, 저정밀 벨트 구동 장치에 적합합니다.
벨트 구동식 농기계에 사용되는 고하중 직각 드라이브는 서보급 정밀도보다는 높은 토크, 충격 하중 및 옥외 노출이 주요 요구 사항입니다.
EP-FALR 변속기 사양을 정할 준비가 되셨습니까?
모터 모델, 필요한 출력 토크, 기어비, 벨트 프로파일, 예상 벨트 장력(F_rad 확인용), 그리고 필요한 출력 하우징 방향을 알려주십시오. 저희 엔지니어들이 24시간 이내에 답변드리겠습니다.
자주 묻는 질문
엔지니어들이 EP-FALR 시리즈에 대해 하는 말
갠트리, 컨베이어 및 권선 설비에 EP-FALR 직각 일체형 벨트 풀리 기어박스를 사용하는 기계 제조업체의 피드백입니다.
저희는 EP-FALR190 모터를 석재 CNC 갠트리 X축에 i=5 설정으로 사용하고 있습니다. 모터가 갠트리 끝판 뒤쪽으로 이동 방향에 수직으로 접히도록 설계하여 기존의 일렬 배치 방식보다 작업 길이가 180mm 늘어났습니다. 또한, 일체형 풀리 덕분에 습식 석재 슬러리 환경에서 주요 유지보수 문제였던 외부 지지 베어링과 브래킷을 제거할 수 있었습니다. IP65 등급은 18개월이 지난 현재까지도 완벽하게 유지되고 있습니다.

"EP-FALR230을 i=100으로 설정하여 필름 와인더에 사용했는데, 서보 모터가 벨트로 연결된 맨드릴을 90° 각도로 구동합니다. 100:1의 기어비 덕분에 기존 구동 체인에 있던 별도의 인라인 감속기를 제거할 수 있었고, 전체 구동 부품 수가 7개에서 4개로 줄었습니다. 권선 장력 제어 안정성이 눈에 띄게 향상되었습니다."
"레이저 절단 갠트리 Y축에 장착된 EP-FALR110-P1 모터는 엔드 플레이트 뒤쪽에 있고, 벨트는 빔을 따라 움직입니다. 4방향 출력 하우징 방향 설정이 중요했는데, 시제품 제작 과정에서 하우징을 재주문하지 않고 단순히 회전시켜 세 가지 다른 모터 위치를 테스트했습니다. 좋은 조언은 기계를 고객에게 보내기 전에 필요한 방향을 확인하는 것입니다."
"저희는 플라즈마 절단 갠트리 코너 드라이브에 EP-FALR280 모터를 i=9 설정으로 사용하고 있습니다. 모터는 벨트에 수직으로 배치되어 있으며, 34,200 N F_rad의 토크로 22,800 N의 장력을 가진 AT10 × 75 mm 벨트를 안정적으로 구동합니다. 갠트리 구동부에서 작업 공간이 200 mm 확보되었습니다. 한 가지 유지보수 유의사항은 벨트 교체 후 벨트와 풀리의 평행도를 확인해야 한다는 것입니다. 직각 구조 때문에 이 작업은 두 사람이 함께 해야 합니다."
"당사의 카르테시안 로봇 모듈에서 X축 모터는 설계상 X축 벨트 이동 방향과 수직을 이루도록 되어 있어 직각 구동 방식이 필수적이었습니다. 이전에는 EP-FABR + 별도 풀리 허브 + 지지 베어링으로 총 6개의 부품과 3번의 정렬 작업이 필요했습니다. 하지만 이제 EP-FALR095를 사용하면 부품 1개와 1번의 정렬 작업만으로 조립이 완료됩니다. 로봇 모듈당 조립 시간이 3시간 30분에서 40분으로 단축되었습니다."
추가 정보
| 편집자 | Cxm |
|---|
연관 상품
-

EP-HAB 시리즈 고강성 유성 기어박스 — ≤3 아크분 초정밀, IP65 밀폐형
-

EP-WPBL/WPBF 시리즈 고정밀 직각 유성 기어박스 — ≤8 Arcmin, IP65, 90° 출력
-

EP-PBL/PBF 시리즈 고정밀 유성 기어박스 — ≤5 아크분 백래시, IP65 밀폐형
-

EP-WPL/WPF 시리즈 직각 유성 기어박스 - 공간 제약이 있는 설치 환경에 적합한 90° 출력
-

EP-PL/PF 시리즈 표준 정밀 유성 기어박스 - 원형 및 사각형 플랜지 인라인 출력
-

EP-FADS 시리즈 어댑터 플랜지 고속 유성 기어박스 | 모터 직접 장착
-

EP-FAD 시리즈 고속 정밀 유성 기어박스 | 원형 플랜지
-

EP-FAB 시리즈 고정밀 유성 기어박스 | 사각 플랜지 인라인

